Our CloudGripper demo was accpeted to CoRL in Seoul, Korea 🇰🇷
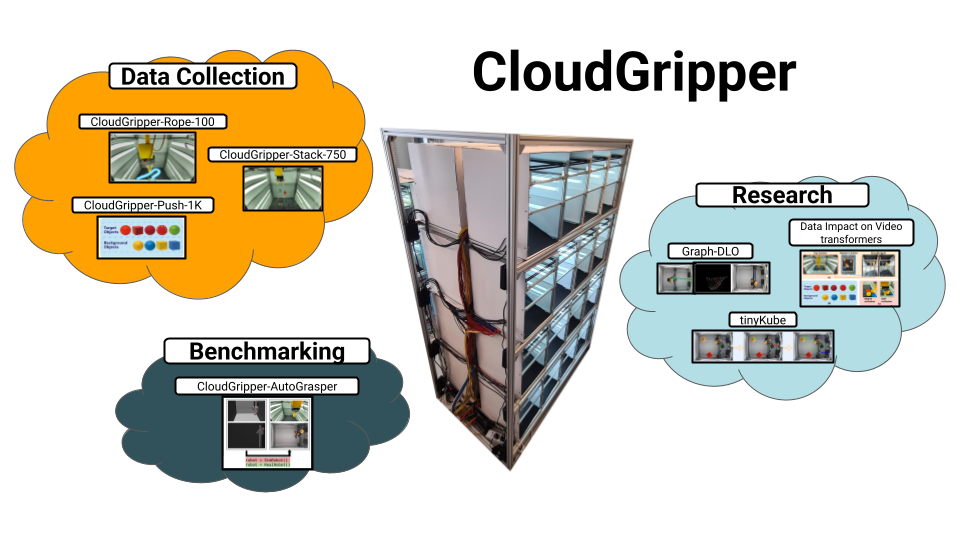
I am co-organizing a demo at the Conference on Robot Learning (CoRL) 2025! The demo is “CloudGripper - An Open Source Cloud Robotics Testbed for Robotic Manipulation Research, Data Collection and Experimentation at Scale.” CloudGripper is a cloud robotics platform with more than 30 internet‑connected robot arm workcells developed at the KTH Royal Institute of Technology in Sweden. Each workcell includes the same sensors and lights. In this demo, we present an update on the latest developments on CloudGripper as a fully open-source, freely available community platform that remotely supports reproducible experiments, benchmarking, and large‑scale dataset collection. The demo features teleoperation and programming of remote robots; demonstrations of recent work on automatic data‑collection systems for rigid and deformable objects; and data-driven robotic scene augmentation for domain randomization in robotic datasets. Multiple attendees can interact with CloudGripper in real time and explore the cloud-native testbed for scalable data collection and future foundation model development.
Muhammad Zahid has done an amazing job building CloudGripper. The efforts of Zahid and Florian through their company, Scaleup Robotics AB, engaging global users in the past few years truly democratizes access to robotics. They have facilitated robot manipulation workshops at the Deep Learning Indaba 2024 Workshop on Robot Learning for Africa in Senegal, at the 2024 San Francisco Public Library Tech Week in the U.S., and at the Summer School on Reinforcement Learning and Large Language Models at the Università degli Studi di Padova, Italy.
It was fun to co-organize this demo along with other researchers who use CloudGripper for their large-scale, real-world robot learning data collection, Shutong Jin, Axel Kaliff, and Ruiyu Wang.
References
[1] M. Zahid and F. T. Pokorny, “CloudGripper: An Open Source Cloud Robotics Testbed for Robotic Manipulation Research, Bbenchmarking, and Data Collection at Scale,” in IEEE International Conference on Robotics and Automation, 2024, pp.12076–12082.